Notes
- 功能
- 在 PyBullet 仿真环境里加载一个 Franka Emika Panda 机械臂;
- 利用一个 动态模型(Pinocchio 封装) 来做前向运动学和控制;
- 给机械臂的末端执行器一个 正弦参考轨迹;
- 用 反馈线性化控制器 计算力矩指令并驱动机器人;
- 记录数据,并在最后绘制 关节位置和速度的跟踪曲线。
- CartesianDiffKin,高级控制器
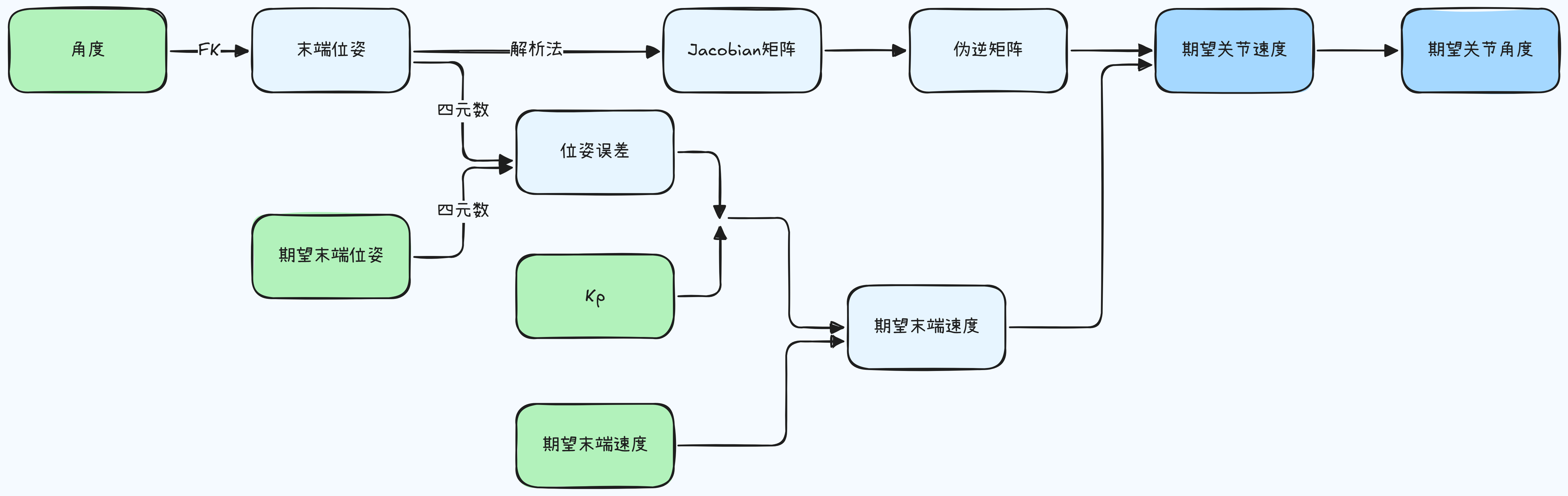
- 输入
dyn_model:机器人动力学模型(能算 FK、Jacobian 等)。controlled_frame_name:被控制的连杆(比如 panda_link8)。cur_q:当前关节角度。p_des, pd_des:期望末端位置和速度。ori_des, ori_vel_des:期望末端姿态和角速度。delta_t:时间步长。ori_pos_both:控制模式(位置 / 姿态 / 两者)。kp_pos, kp_ori:笛卡尔空间 P 控制增益。joint_vel_saturation:关节速度限制。
- 输出
q_des:下一步期望关节角度。qd_des_clip:饱和后的期望关节速度。
- 解析法
- 分析过程
- FeedbackLin,低级控制器
feedback_lin_ctrl 计算关节力矩指令 tau_FL,使得机器人关节能按照期望位置 q_d 和期望速度 qd_d 跟踪,补偿掉了机器人动力学的非线性部分(惯性、科里奥利力、重力)。- 过程
- 设置 PD 增益矩阵
P 和 D。
- 用动力学模型
dyn_model 计算惯性矩阵、科里奥利、重力项。
- 计算位置和速度误差。
- 生成虚拟控制输入
u(PD 控制律)。
- 通过反馈线性化,把
u 转成实际关节力矩 tau_FL。
- 输入
dyn_model: 封装了机器人动力学(质量矩阵 M,科里奥利项 c,重力项 g 等)的对象,基于 Pinocchio。q_: 实际测量的关节位置。qd_: 实际测量的关节速度。q_d: 期望的关节位置。qd_d: 期望的关节速度。kp, kd: 控制器增益,可以是标量(所有关节一样)或向量(每个关节不同)。
- 输出
- 分析过程