3 most important points
5 thoughts
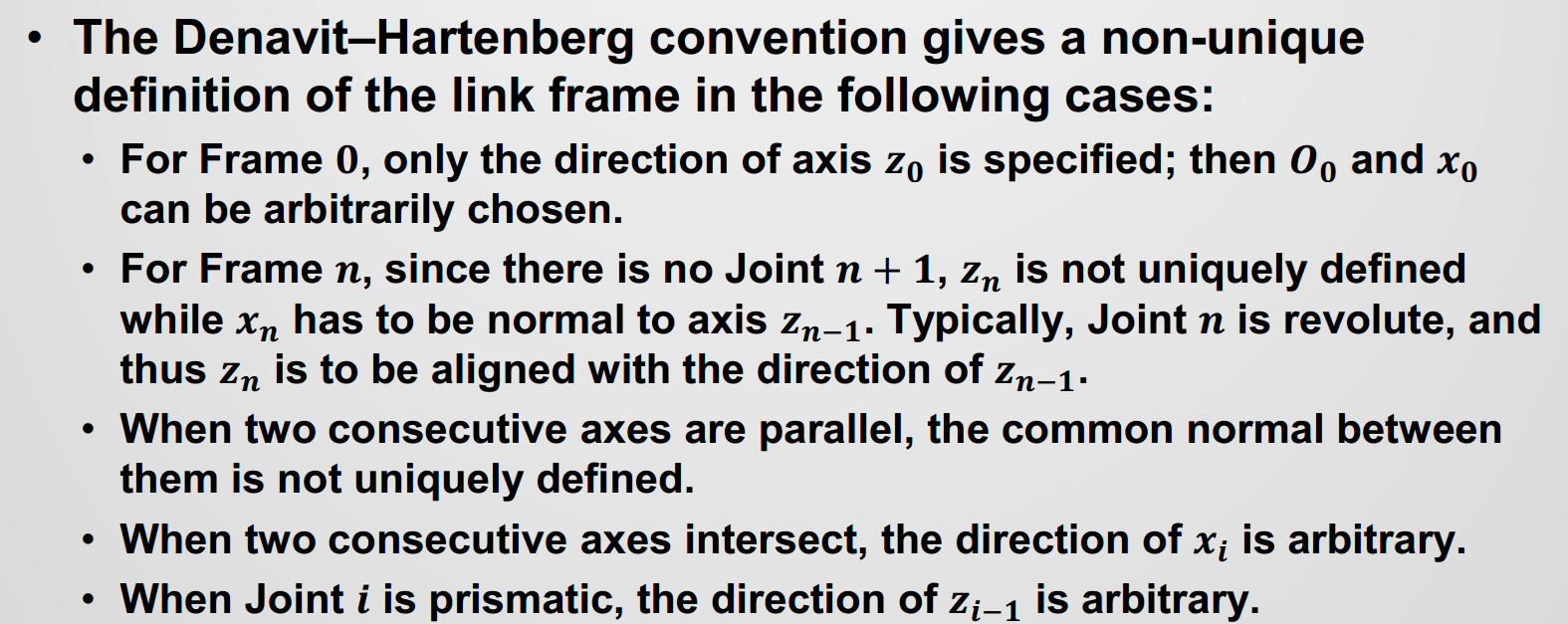
- 显然改进 D-H 参数法用的比较多
- 如果两个 z 轴在一点相交,那么一般把两个坐标系都放在交点处
- 如果两个 z 轴共线,那么可以合并
Notes
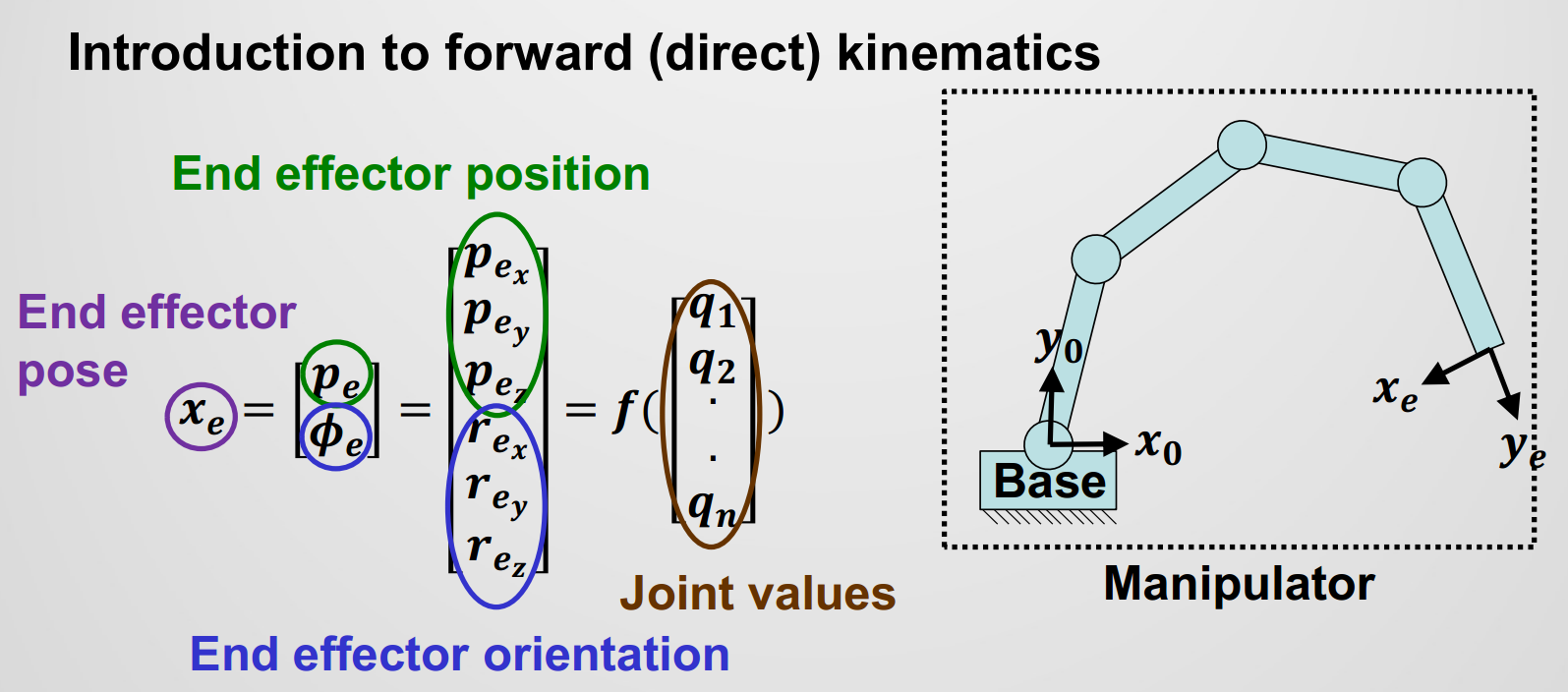
- 目的是对末端效应器的位姿进行建模
- 位置(3 个参数)
- 姿态(3 个参数)
Example
自由度与运动副
自由度
在三维空间中,一个刚体(比如一个连杆)最多拥有 6 个自由度。
- 3 个平移自由度:沿着三个互相垂直的坐标轴(例如 X, Y, Z 轴)进行直线运动。
- 3 个旋转自由度:绕着这三个互相垂直的坐标轴进行旋转运动。
这就像一个在空中自由飞行的无人机:
- 它可以向前/后、左/右、上/下移动(3 个平移)。
- 它可以俯仰、偏航、滚转(3 个旋转)。
然而,一个有 6 个自由度为 1 的关节的机械臂,其总自由度(即末端执行器在空间中的独立运动数目)取决于这 6 个关节的类型和它们的轴线在空间中的排列方式。
- 在精心设计的、非奇异的构型下,它的自由度是6。
- 如果关节轴线排列导致运动冗余或奇异性,它的有效自由度会小于 6。
- Links 从 base 开始标号,base 为 0,末端为
- Joints 从 1 开始标号,分别关联 link 和
- Lower Pair:指的是两个构件之间面接触的运动副
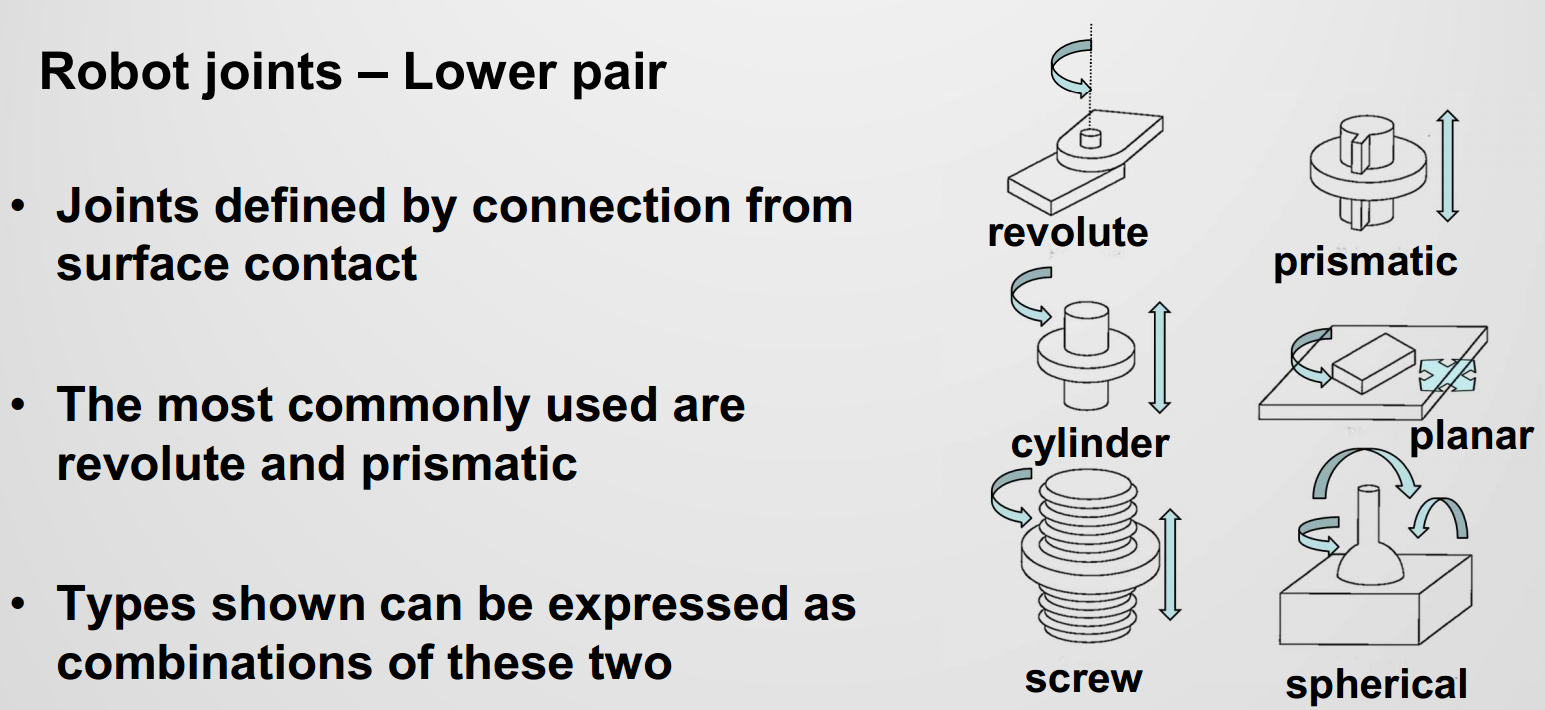
- Higher Pair:指的是两个构件之间点接触或线接触的运动副
- Lower Pair:指的是两个构件之间面接触的运动副
| 特征 | Higher Pair(高副) | Lower Pair(低副) |
|---|---|---|
| 接触形式 | 点接触 或 线接触 | 面接触 |
| 自由度 (相对) | 相对较多,约束较少 | 相对较少,约束更多 |
| 接触压强 | 高(因为接触面积小) | 低(因为接触面积大) |
| 磨损与寿命 | 更容易磨损,寿命较短 | 更耐磨,寿命较长 |
| 常见例子 | 齿轮副(齿与齿是点/线接触) 凸轮与从动件(点/线接触) 滚动轴承(滚珠与轨道是点接触) 火车车轮与钢轨(理论上为线接触) | 旋转副/铰链(如门合页,圆柱面接触) 移动副/棱柱副(如活塞与气缸,面接触) 球面副(如球铰,球面接触) 螺旋副(如螺丝与螺母,螺纹面接触) |
| 直观比喻 | 踩高跷:高跷与地面是点接触,不稳定,压强大。 两个玻璃球相碰 | 穿平底鞋站立:鞋底与地面是面接触,稳定,压强小。 抽屉在柜体里滑动 |
D-H 参数法
- 全名:Denavit-Hartenberg Convention
- 价值:
- 想象一个机器人手臂由一系列连杆和关节组成。要描述末端执行器在空间中的位置和姿态,最直接的方法是为每个连杆建立一个坐标系。但如何建立这些坐标系?它们之间的关系又如何描述?
- D-H 方法通过一套严格的规则解决了这个问题,确保每个相邻坐标系之间的变换都可以用仅有的 4 个参数 来表示。
经典 D-H 参数
参数 符号 描述 连杆长度 从关节轴 i-1到关节轴i的公垂线距离。可以理解为连杆的“长度”。连杆扭角 绕关节轴 i-1和关节轴i之间的公垂线,将轴i-1旋转到与轴i平行所需的角度。可以理解为连杆的“扭曲”程度。连杆偏距 沿关节轴 i的方向,从连杆i-1的坐标系原点移动到与关节轴i的公垂线交点处的距离。对于移动关节,这是一个变量。关节角 绕关节轴 i,将连杆i-1的 X 轴旋转到与连杆i的 X 轴平行所需的角度。对于旋转关节,这是一个变量。
- 在这 4 个参数中,只有 1 个是变量:
- 如果是旋转关节,则 是变量。
- 如果是移动关节,则 是变量。
- 其余 3 个参数是由机器人机械结构的物理尺寸决定的常量。
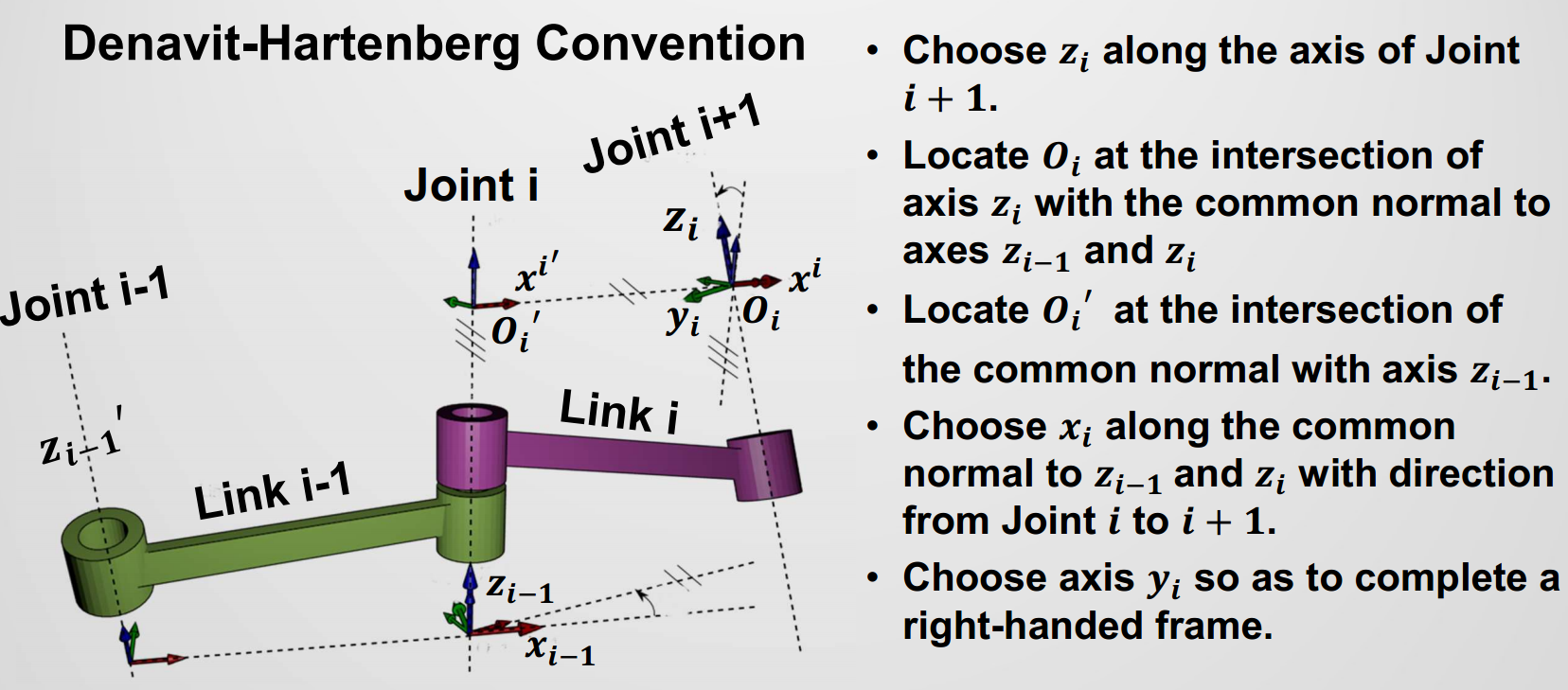
- 建模步骤
- 建立坐标系:按照 D-H 规则,为每个连杆分配一个坐标系(Z 轴沿关节轴,X 轴沿公垂线方向)。
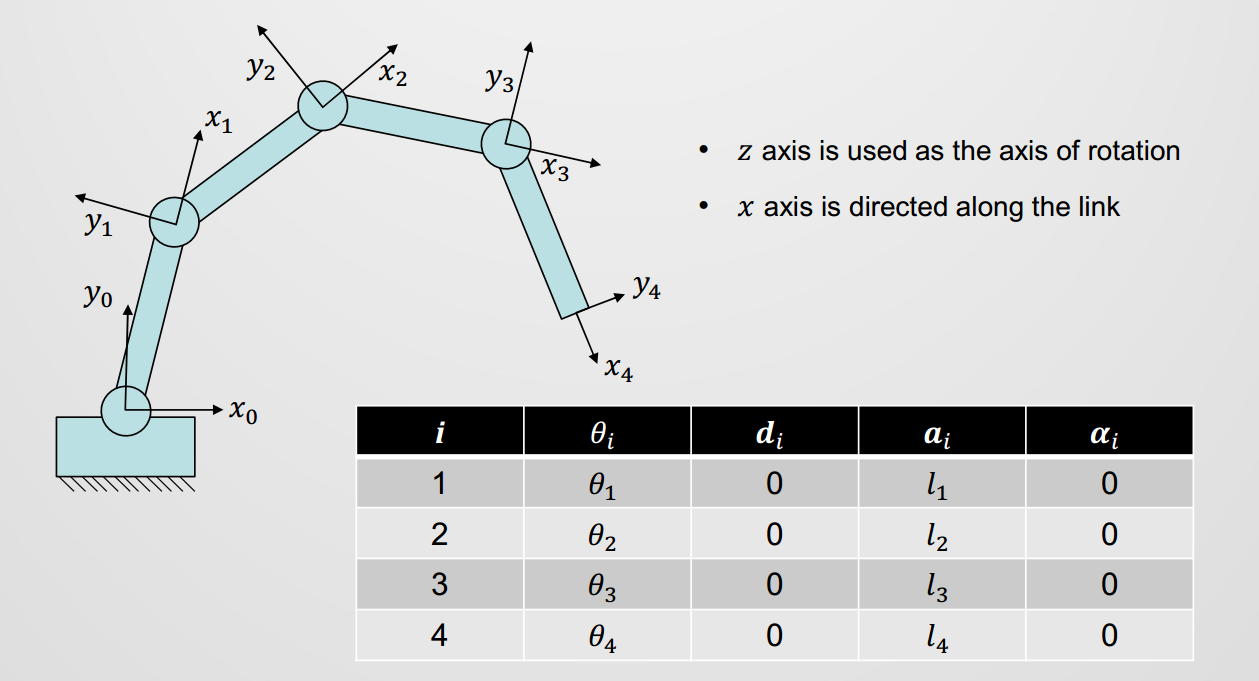
- 确定参数:根据机械结构,为每一对相邻的连杆确定 4 个 D-H 参数 。
- 构建变换矩阵:利用这 4 个参数,可以写出一个标准的 齐次变换矩阵,该矩阵描述了如何将坐标系
i变换到坐标系i-1。 - 计算总变换:将所有的连杆变换矩阵连乘起来,就能得到从机器人基座(坐标系 0)到末端执行器(坐标系 n)的总变换矩阵;就是机器人的运动学方程,它包含了末端执行器的位置和姿态信息,是所有运动控制的基础。
- 建立坐标系:按照 D-H 规则,为每个连杆分配一个坐标系(Z 轴沿关节轴,X 轴沿公垂线方向)。
变换矩阵公式
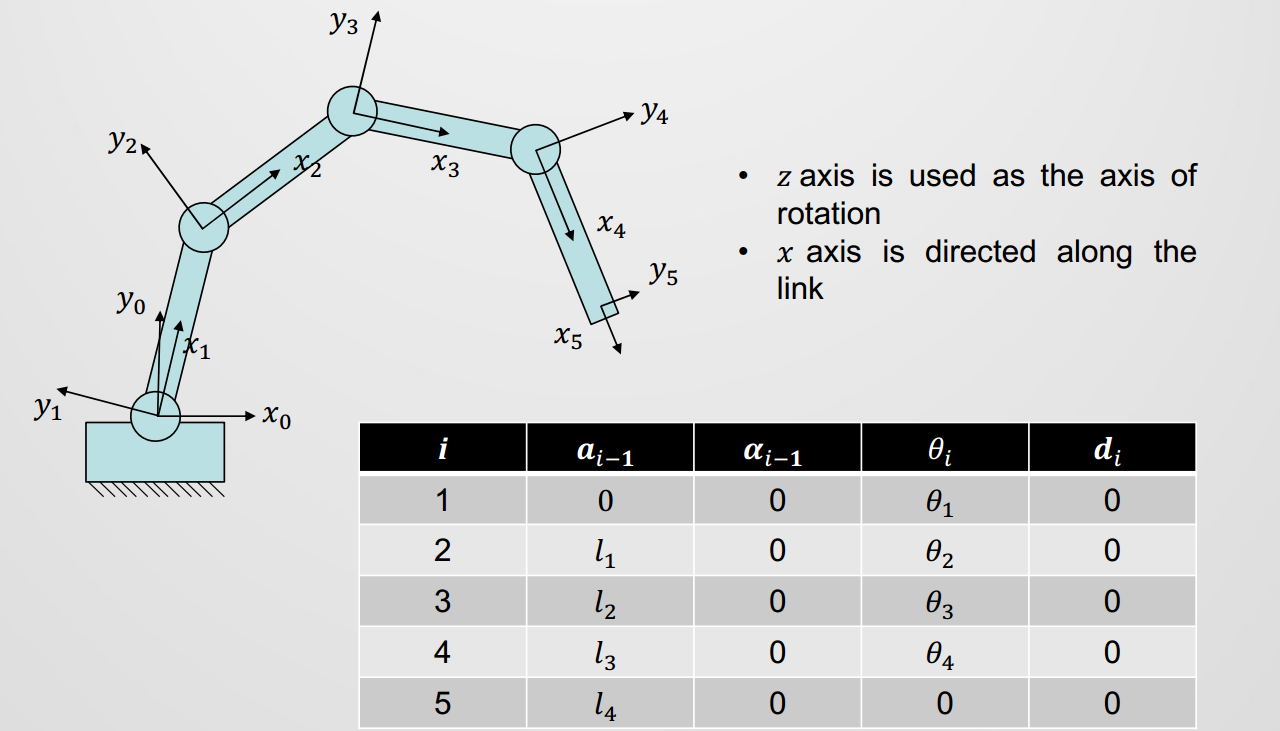
Modified D-H 参数法
改进 D-H 参数法,也常被称为 Craig’s Modified D-H 参数法,是对标准 D-H 参数法的一种优化。它通过微调坐标系附着的方式,在处理某些类型的机器人时(特别是树状或带闭链的机构)更为直观和方便,并且在动力学分析中更具优势。
核心思想:坐标系附着点的改变
- 标准 D-H:将坐标系
{i}附着在连杆i的远端(即靠近下一个关节i+1的一端)。- 改进 D-H:将坐标系
{i}附着在连杆i的近端(即靠近自身关节i的一端)。
在改进 D-H 法中,四个参数是围绕同一个坐标系 {i} 和同一个关节轴 i 来定义的,这使得定义更加统一和直观。
改进 D-H 参数
对于连杆
i和关节i,其参数定义如下:
参数 符号 描述 围绕的轴 连杆长度 从关节轴 i到关节轴i+1的公垂线距离。X 轴 连杆扭角 绕 轴,将关节轴 i旋转到与关节轴i+1平行所需的角度。X 轴 连杆偏距 沿 轴(关节轴 i),从 轴移动到 轴的距离。Z 轴 关节角 绕 轴(关节轴 i),从 轴旋转到 轴所需的角度。Z 轴
- 所有参数都与坐标系
{i}相关联。- 同样,只有 1 个是变量:
- 如果是旋转关节,则 是变量。
- 如果是移动关节,则 是变量。
- 改进 D-H 的坐标系建立步骤
- 确定 Z 轴: 轴沿关节 的轴线方向。
- 确定原点:原点 是 轴和 轴的公垂线与 轴的交点。
- 确定 X 轴: 轴沿 轴和 轴的公垂线方向,从关节 指向关节 。
- 确定 Y 轴:通过右手定则,由 和 确定 轴。
- 示意图:
变换矩阵公式
对比
让我们用一个简单的旋转连杆来对比:
特性 标准 D-H 改进 D-H 坐标系位置 附着在连杆远端 附着在连杆近端 参数关联 参数在连杆 i-1和关节i之间“混合”所有参数都与连杆 i和关节i清晰关联变换直观性 稍差,参数定义跨越连杆 更直观,所有操作都围绕当前坐标系进行 动力学应用 较不方便 更方便,因为坐标系固定在连杆本体上,惯性张量定义更自然 普及度 传统、经典,在很多教科书中使用 在现代机器人工具箱(如 Robotics Toolbox for MATLAB)中更常用 改进 D-H 法的优点:
- 直观性:参数定义全部围绕同一个坐标系,物理意义更清晰。
- 动力学友好:坐标系固定在连杆上,极大地简化了连杆质心、惯性张量等动力学参数的定义。
- 编程方便:其统一的变换流程更容易在代码中实现。
指数积法 Product of Exponentials (PoE)
Warning
具体推导过程见课件 4- Jacobian and Differential Kinematics
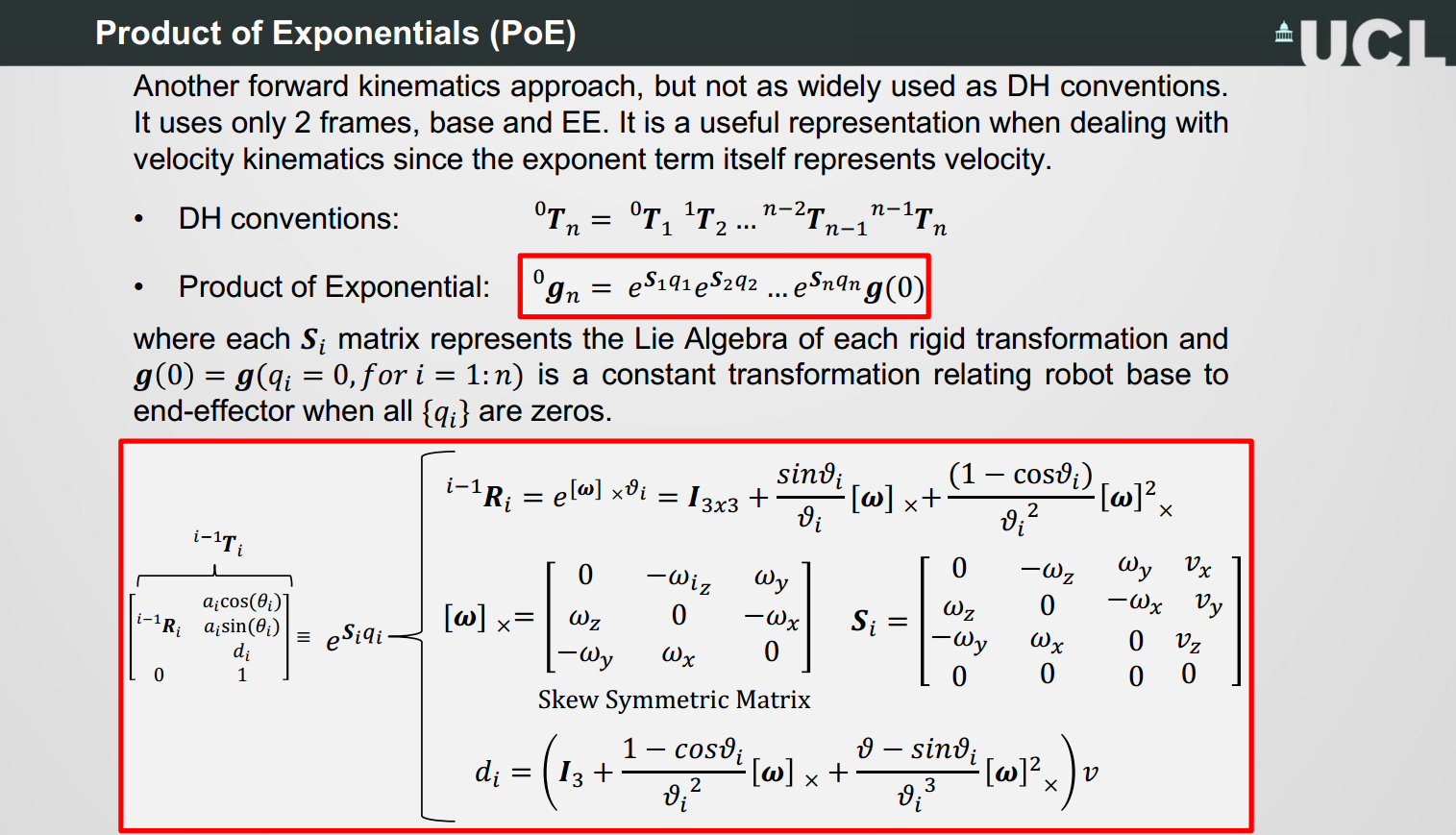
- 核心思想
- 只使用两个坐标系:只需要建立基座坐标系 和末端执行器坐标系 ,无需像 D-H 法那样为每个连杆建立坐标系。
- 运动链视为一系列刚体运动的“指数”相乘:将机器人从基座到末端的整体变换,表示为各个关节运动(以指数形式表示)的乘积。
- 基于旋量理论:该方法建立在李群李代数的旋量理论之上,数学上非常优雅。
与 D-H 参数法的直观对比
特性 D-H 参数法 指数积法 坐标系数量 每个连杆一个坐标系 仅需两个坐标系(基座和末端) 建模思路 几何参数化:通过相邻连杆的几何关系(a, α, d, θ)一步步推导 运动叠加:将每个关节的运动(旋量 ) 直接以指数形式相乘 计算基础 齐次变换矩阵连乘 矩阵指数的连乘 优点 直观,易于理解,有标准步骤 公式统一,无奇异性问题,特别适合速度级运动学和动力学分析 缺点 对于复杂结构(如并联、闭链)建模困难 数学抽象,需要李群李代数基础
-
核心公式:
- :
- 这是机器人的“零位构型”。
- 表示当所有关节变量 时,末端坐标系相对于基座坐标系的齐次变换矩阵。
- 它是一个常数矩阵,描述了机器人的初始姿态。
- (运动旋量):
- 这是指数积法的核心参数。
- 它是一个 的矩阵,封装了第 个关节的运动轴信息。
- 其形式为:
- 其中:
- 是一个 的反对称矩阵,代表了关节旋转轴的方向。实际上是角速度
- 是一个 的向量,与关节的位置有关。对于旋转关节,它包含了轴上任意一点的信息;对于移动关节,它表示移动的方向。
- 其中:
- (矩阵指数):
- 这代表了第 i 个关节运动 (角度或位移)所对应的刚体变换。
- 它计算的是一个齐次变换矩阵,描述了由关节 i 的运动所引起的刚体位移。
- :
-
运动旋量 的深入理解
-
反对称矩阵 : 它将一个三维向量 转化为一个反对称矩阵,用于表示叉乘运算:
-
运动旋量 : 它由 和 组合而成。
-
矩阵指数的计算(罗德里格斯公式)
计算 中旋转部分和平移部分的公式,实际上是罗德里格斯公式在旋量表示下的形式。
对于一个旋转关节(,):
旋转部分 : 这个公式可以直接计算绕轴 旋转 角后的旋转矩阵。
平移部分 : 这个公式计算了由于旋转和平移耦合效应产生的位移。
- 重要性
- 统一性:对于旋转关节和移动关节,公式形式完全统一,无需区分。
- 数值稳定性:避免了 D-H 法中在奇异构型附近可能出现的数值问题。
- 速度级运动学直接相关:运动旋量 直接对应于雅可比矩阵的列,使得速度分析和控制更加直接。
- 现代机器人学的基石:它是理解机器人动力学、优化控制和现代几何机器人理论的基础。